![]()
|
|||||
 |
仭奣梫 丂暿攧偺俠俙俿乚俉侽侾俆俽俵俠乚俹俧乮僷儖僗敪惗乯儃乕僪偲慻傒崌傢偣偰巊梡偡傞偙偲偵傛傝僒乕 儃儌乕僞偺埵抲惂屼媦傃曗娫惂屼傪峴偆偙偲偑偱偒傑偡丅 丂娭悢敪惗梡俴俽俬偲偟偰俲俵俁俈侽侾丄埵抲惂屼俴俽俬偲偟偰俲俵俁俈侽俀傪巊梡偟偰偄傑偡偺偱丄 捈慄丄墌屖曗娫惂屼傪偲傕側偭偨埵抲寛傔偑斾妑揑梕堈偵幚尰偱偒傑偡丅 丂巜椷揹埑弌椡梡偲偟偰侾俀價僢僩俢乛俙僐儞僶乕僞傪幚憰偟偰偄傑偡偺偱偦偺傑傑僒乕儃儌乕僞僪儔 僀僶偵愙懕偱偒傑偡丅枖丄掽攞婡擻晅偒偺儘乕僞儕乕僄儞僐乕僟僀儞僞乕僼僃乕僗夞楬偵傛傝僄儞僐乕 僟偐傜偺僼傿乕僪僶僢僋僷儖僗傪捈愙庴偗偲傞偙偲偑偱偒傑偡丅 丂偙偺懠僼僅僩僇僾儔偵傛傝傾僀僜儗乕僩偝傟偨儕儈僢僩擖椡夞楬傕幚憰偟偰偍傝杮儃乕僪侾枃偱侾幉 暘偺惂屼偑偱偒幉悢枃巊梡偡傞偙偲偵傛傝摨帪懡幉惂屼偑壜擻偱偡丅乮俠俙俴俉侽侾俆俽俵俠乚俹俧僷 儖僗敪惗儃乕僪偼懡幉惂屼偺応崌偱傕侾枃巊偄偱偡丅暋悢枃巊梡偡傞偙偲傕壜擻乯 丂俽俵俠乚俠俹偼俬俠偺幚憰撪梕偵 傛傝俁庬椶偺惢昳偑梡堄偝傟偰偄傑偡丅 |
||||
| 僽儘僢僋恾 | 巇條 | ||||
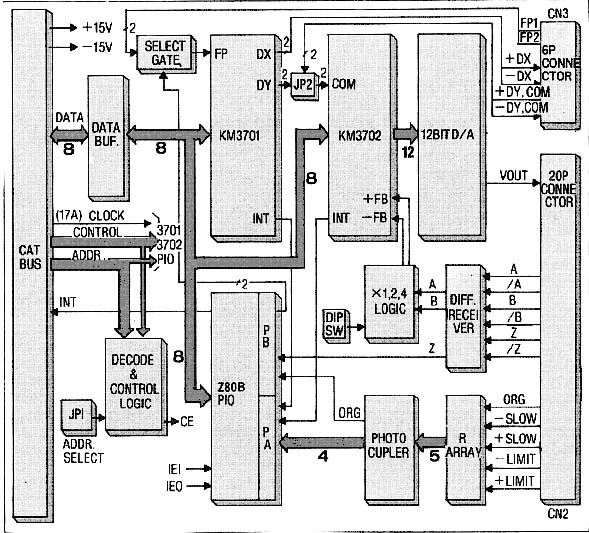 |
仠巊 梡 俬 俠 丗娭悢敪惗梡LSI 俲俵俁俈侽侾丄埵抲惂屼梡LSI 俲俵俁俈侽俀 丂俢乛俙僐儞僶乕僞俢俙俠俉侽侽丄僷儔儗儖俬乛俷丂倅俉侽俛亅俹俬俷 仠嵟戝巜椷抣 丗亄俉俁俉俉俇侽俈乣亅俉俁俉俉俇侽俉僷儖僗 仠嵟戝僷儖僗敪惗懍搙丗捈慄曗娫俋侽.俋俲倫倫倱丄墌屖曗娫係俈.俇俲倫倫倱 仠巜椷揹埑弌椡 丗亄俋丏俋俋俆倁乣亅侾侽丏侽侽侽倁乮暘夝擻侾俀價僢僩乯 仠埵 抲 専 弌 丗儘乕僞儕乕僄儞僐乕僟偐傜偺僼傿乕僪僶僢僋僷儖僗偵傛傞丅 仠掽 攞 婡 擻 丗俢倢俹僗僀僢僠偺愝掕偵傛傝僼傿乕僪僶僢僋僷儖僗傪亊侾丄 亊俀丄亊係 掽攞偡傞偙偲偑偱偒傑偡丅 仠儕儈僣僩怣崋擖椡丗僼僅僩僇僾儔偵傛傞傾僀僜儗乕僔儑儞擖椡丅 僗僩儘乕僋僄儞僪亄俴倢俵倢俿丄亅俴倢俵倢俿 尭懍儕儈僢僩亄俽俴俷倂丄亅俽俴俷倂 尨揰儕儈僢僩俷俼俧 仠尨 揰 怣 崋 丗尨揰儕儈僢僩媦傃僄儞僐乕僟偺儅乕僇怣崋偵傛傞丅 仠傾儔乕儉怣崋 丗俲俵俁俈侽俀偺乛倢俶俿怣崋傪俹倢俷傊擖椡丅 仠揹 尮 丗亄俆倁丂俁侽侽倣俙丄亄侾俆伾丂俀侽倣俙丄-侾俆伾丂俁侽倣俙 |
||||
![]()